操作系统
一、操作系统概述
1.1 操作系统定义与功能
- 定义:管理计算机硬件与软件资源的系统软件
- 核心功能:
- 硬件抽象(进程、文件、设备等)
- 资源管理(CPU、内存、I/O等)
- 提供用户接口(CLI、GUI)
- 系统安全与保护
1.2 操作系统发展历史
| 代次 |
时期 |
主要特点 |
| 第一代 |
1945-1955 |
真空管,无操作系统 |
| 第二代 |
1955-1965 |
晶体管,批处理系统 |
| 第三代 |
1965-1980 |
集成电路,多道程序设计 |
| 第四代 |
1980-至今 |
个人计算机时代 |
| 第五代 |
1990-至今 |
移动计算时代 |
1.3 现代操作系统架构
graph TD
A[用户程序] -->|系统调用| B[操作系统内核]
B --> C[硬件资源]
B --> D[进程管理]
B --> E[内存管理]
B --> F[文件系统]
B --> G[设备驱动]
二、进程与线程
2.1 进程概念
- PCB结构:
struct task_struct {
pid_t pid; // 进程ID
state_t state; // 进程状态
struct mm_struct *mm; // 内存管理信息
struct files_struct *files; // 打开文件
// ...其他字段...
};
2.2 进程生命周期
stateDiagram
[*] --> New
New --> Ready: 初始化完成
Ready --> Running: 被调度
Running --> Ready: 时间片用完
Running --> Waiting: 等待资源
Waiting --> Ready: 资源可用
Running --> Terminated: 执行完成
2.3 线程实现模型
| 模型 |
特点 |
示例系统 |
| 1:1 |
每个用户线程对应一个内核线程 |
Linux |
| N:1 |
多个用户线程映射到一个内核线程 |
早期Java |
| M:N |
混合模型,灵活映射 |
Windows NT |
三、并发编程基础
3.1 并发问题三大挑战
- 原子性丧失:操作被中断导致数据不一致
// 非原子操作示例
counter++; // 编译为多条机器指令
- 顺序性丧失:编译器/处理器重排序
- 全局一致性丧失:多处理器内存可见性问题
3.2 并发控制机制对比
| 机制 |
优点 |
缺点 |
适用场景 |
| 互斥锁 |
简单可靠 |
可能死锁 |
一般临界区保护 |
| 条件变量 |
高效等待 |
使用复杂 |
生产者-消费者 |
| 信号量 |
灵活控制 |
容易出错 |
资源池管理(球,袋) |
| 原子操作 |
高性能 |
功能有限 |
计数器等简单操作 |
死锁产生的四个必要条件:需要的资源是互斥的、占有资源并等待更多的资源、不可直接抢别人持有的资源即只有等持有的人主动释放、形成循环等待的环
四、同步原语实现
4.1 互斥锁实现方案
4.1.1 Peterson算法(软件实现)
// 两线程互斥算法
int flag[2] = {0, 0};
int turn = 0;
void lock(int self) {
flag[self] = 1;
turn = 1 - self;
while (flag[1-self] && turn == 1-self);
}
void unlock(int self) {
flag[self] = 0;
}
4.1.2 硬件原子指令实现
// 使用CAS实现自旋锁
typedef struct {
int locked;
} spinlock_t;
void spin_lock(spinlock_t *lock) {
while (__sync_lock_test_and_set(&lock->locked, 1));
}
void spin_unlock(spinlock_t *lock) {
__sync_lock_release(&lock->locked);
}
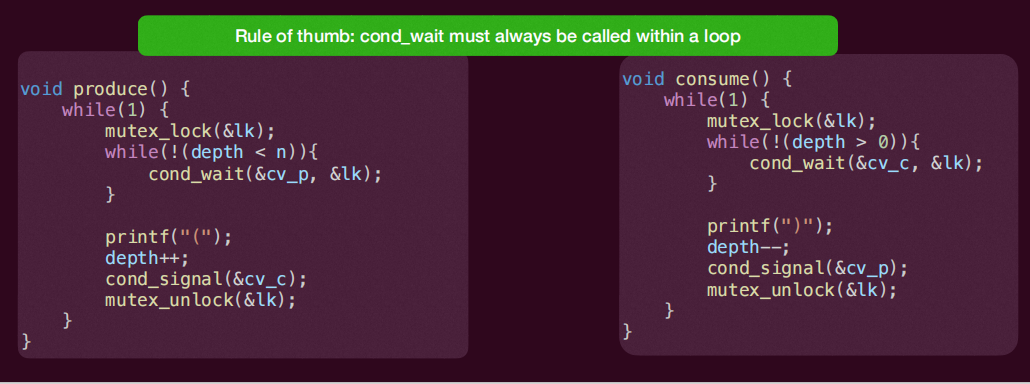
4.2 条件变量实现模式
条件变量实现同步的万能公式:
// 条件变量使用范式
pthread_mutex_t lock;
pthread_cond_t cond;
// 等待方
pthread_mutex_lock(&lock);
while (!condition) {
pthread_cond_wait(&cond, &lock);
}
// 执行操作
pthread_mutex_unlock(&lock);
// 通知方
pthread_mutex_lock(&lock);
condition = true;
pthread_cond_signal(&cond);
pthread_mutex_unlock(&lock);
举例:
#include <stdio.h>
#include <pthread.h>
#include <stdbool.h>
#include <unistd.h>
#define BUFFER_SIZE 5
pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;
pthread_cond_t cond_not_empty = PTHREAD_COND_INITIALIZER; // 缓冲区非空条件
pthread_cond_t cond_not_full = PTHREAD_COND_INITIALIZER; // 缓冲区未满条件
int buffer[BUFFER_SIZE];
int count = 0; // 当前缓冲区中的数据量
void* consumer(void* arg) {
while (1) {
pthread_mutex_lock(&lock);
// 只有缓冲区非空时才能消费
while (count == 0) {
printf("Consumer: 缓冲区空,等待...\n");
pthread_cond_wait(&cond_not_empty, &lock);
}
// 消费数据
int item = buffer[--count];
printf("Consumer: 消费数据 %d (缓冲区剩余: %d)\n", item, count);
// 通知生产者缓冲区未满
pthread_cond_signal(&cond_not_full);
pthread_mutex_unlock(&lock);
sleep(1); // 模拟消费耗时
}
return NULL;
}
void* producer(void* arg) {
int item = 0;
while (1) {
pthread_mutex_lock(&lock);
// 只有缓冲区未满时才能生产
while (count == BUFFER_SIZE) {
printf("Producer: 缓冲区满,等待...\n");
pthread_cond_wait(&cond_not_full, &lock);
}
// 生产数据
buffer[count++] = item;
printf("Producer: 生产数据 %d (缓冲区总量: %d)\n", item++, count);
// 通知消费者缓冲区非空
pthread_cond_signal(&cond_not_empty);
pthread_mutex_unlock(&lock);
sleep(1); // 模拟生产耗时
}
return NULL;
}
int main() {
pthread_t tid1, tid2;
pthread_create(&tid1, NULL, consumer, NULL);
pthread_create(&tid2, NULL, producer, NULL);
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
return 0;
}
五、进程调度
5.1 调度指标对比
| 指标 |
描述 |
优化目标 |
| CPU利用率 |
CPU忙碌时间占比 |
最大化 |
| 吞吐量 |
单位时间完成进程数 |
最大化 |
| 周转时间 |
进程完成总时间 |
最小化 |
| 响应时间 |
请求到首次响应时间 |
最小化 |
| 公平性 |
资源分配公平程度 |
平衡 |
5.2 常见调度算法
5.2.1 批处理系统调度
# 短作业优先(SJF)伪代码
def sjf_schedule(processes):
ready_queue = sorted(processes, key=lambda p: p.estimated_time)
while ready_queue:
process = ready_queue.pop(0)
run(process)
5.2.2 交互式系统调度
# 时间片轮转(RR)伪代码
def rr_schedule(processes, time_slice):
ready_queue = deque(processes)
while ready_queue:
process = ready_queue.popleft()
run(process, time_slice)
if not process.finished:
ready_queue.append(process)
5.2.3 实时系统调度
# 最早截止时间优先(EDF)伪代码
def edf_schedule(processes):
ready_queue = sorted(processes, key=lambda p: p.deadline)
while ready_queue:
process = ready_queue.pop(0)
run(process)
六、进程通信与同步
6.1 IPC机制对比
| 机制 |
类型 |
特点 |
适用场景 |
| 管道 |
单向数据流 |
简单,父子进程间 |
命令行管道 |
| 消息队列 |
结构化消息 |
异步通信 |
分布式系统 |
| 共享内存 |
直接内存访问 |
高效,需同步 |
大数据交换 |
| 信号 |
异步通知 |
轻量级 |
事件通知 |
//管道实现父子进程通信
int main() {
int pipefd[2];
pid_t pid;
char buf;
// 创建管道
if (pipe(pipefd) == -1) {
perror("pipe");
exit(EXIT_FAILURE);
}
pid = fork();
if (pid == -1) {
perror("fork");
exit(EXIT_FAILURE);
}
if (pid == 0) {
// 子进程
close(pipefd[1]); // 关闭写端
read(pipefd[0], &buf, 1);
printf("子进程读取到: %c\n", buf);
close(pipefd[0]); // 关闭读端
exit(EXIT_SUCCESS);
} else {
// 父进程
close(pipefd[0]); // 关闭读端
write(pipefd[1], "A", 1);
printf("父进程写入: A\n");
close(pipefd[1]); // 关闭写端
wait(NULL); // 等待子进程结束
}
return 0;
}
6.2 生产者-消费者问题实现
6.2.1 使用信号量
#define BUFFER_SIZE 10
sem_t empty; // 空槽位
sem_t full; // 已填充
sem_t mutex; // 互斥锁
void producer() {
while (1) {
item = produce_item();
sem_wait(&empty);
sem_wait(&mutex);
insert_item(item);
sem_post(&mutex);
sem_post(&full);
}
}
void consumer() {
while (1) {
sem_wait(&full);
sem_wait(&mutex);
item = remove_item();
sem_post(&mutex);
sem_post(&empty);
consume_item(item);
}
}
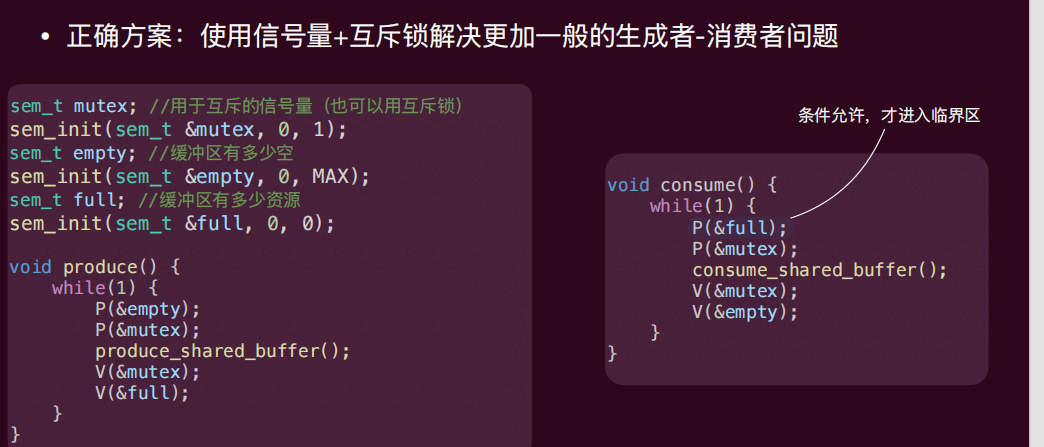
sem_t mutex; //⽤于互斥的信号量(也可以⽤互斥锁)
sem_init(sem_t &mutex, 0, 1);
sem_t empty; //缓冲区有多少空
sem_init(sem_t &empty, 0, MAX);
sem_t full; //缓冲区有多少资源
sem_init(sem_t &full, 0, 0);
void produce() {
while(1) {
P(&mutex);
P(&empty);
produce_shared_buffer();
V(&full);
V(&mutex);
}
}
void consume() {
while(1) {
P(&mutex);
P(&full);
consume_shared_buffer();
V(&mutex);
V(&empty);
}
}
//这里P代表检验,也写作decrease/down/wait/acquire,如果sem的值不是正数就阻塞自己,否则将sem的值减⼀后返回运⾏
//V代表⾃增, 也写作increase/up/post/signal/release,将信号量sem的值加1,如果有⼀个或多个线程阻塞在这个信号量上,选择⼀个唤醒
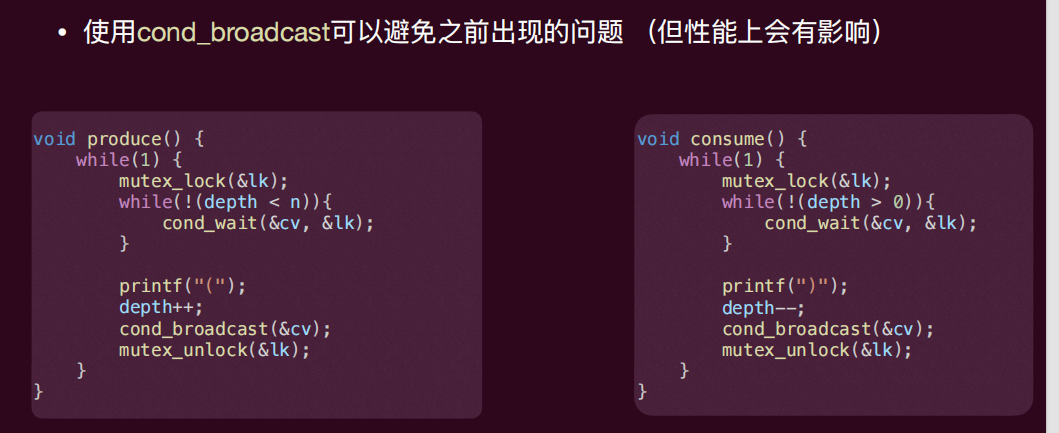
6.2.2 使用条件变量
pthread_mutex_t lock;
pthread_cond_t cond;
int count = 0;
#define MAX 10
void producer() {
while (1) {
pthread_mutex_lock(&lock);
while (count == MAX) {
pthread_cond_wait(&cond, &lock);
}
insert_item();
count++;
pthread_cond_signal(&cond);
pthread_mutex_unlock(&lock);
}
}
void consumer() {
while (1) {
pthread_mutex_lock(&lock);
while (count == 0) {
pthread_cond_wait(&cond, &lock);
}
remove_item();
count--;
pthread_cond_signal(&cond);
pthread_mutex_unlock(&lock);
}
}
七、高级主题
7.1 多核调度挑战
- 负载均衡:
// 负载均衡伪代码
void load_balance() {
if (this_cpu.load > threshold) {
task = find_heaviest_task();
target_cpu = find_least_loaded_cpu();
migrate_task(task, this_cpu, target_cpu);
}
}
- 缓存亲和性:
// 保持任务在相同CPU核心运行
void set_affinity(pid_t pid, int cpu) {
cpu_set_t set;
CPU_ZERO(&set);
CPU_SET(cpu, &set);
sched_setaffinity(pid, sizeof(set), &set);
}
7.2 实时系统调度
- 单调速率分析:
∑(Ci/Ti) ≤ n(2^(1/n) - 1)
其中:
Ci = 任务i的计算时间
Ti = 任务i的周期
n = 任务数量
- EDF可调度条件:
八、实践建议
8.1 并发编程最佳实践
- 锁的使用原则:
- 保持临界区尽量小
- 避免嵌套锁
- 按照固定顺序获取锁
- 使用锁层次结构
- 调试技巧:
# 使用TSAN检测数据竞争
gcc -fsanitize=thread -pthread program.c
./a.out
# 使用GDB调试多线程
gdb -p <pid>
(gdb) info threads
(gdb) thread <id>
8.2 性能优化方向
附录:关键系统调用速查表
进程管理
| 调用 |
描述 |
参数 |
返回值 |
| fork() |
创建子进程 |
无 |
子进程返回0,父进程返回子进程PID |
| execve() |
执行新程序 |
path, argv, envp |
成功不返回,失败返回-1 |
| wait() |
等待子进程终止 |
status指针 |
终止的子进程PID |
线程控制
| 调用 |
描述 |
参数 |
返回值 |
| pthread_create() |
创建线程 |
thread, attr, start_routine, arg |
成功返回0 |
| pthread_join() |
等待线程终止 |
thread, retval |
成功返回0 |
| pthread_mutex_lock() |
获取互斥锁 |
mutex |
成功返回0 |
同步原语
| 调用 |
描述 |
参数 |
返回值 |
| sem_init() |
初始化信号量 |
sem, pshared, value |
成功返回0 |
| pthread_cond_wait() |
等待条件变量 |
cond, mutex |
成功返回0 |
| futex() |
快速用户态互斥 |
uaddr, op, val, timeout |
依赖操作类型 |
九、文件系统专题
9.1 文件系统核心概念
1. 文件组织方式:
- 连续分配(外部碎片问题)
- 链表分配(FAT表优化)
- 索引分配(多级索引)
2. 快速文件系统(FFS):
- 柱面组优化局部性
- 磁盘意识的设计
3. 日志结构文件系统(LFS):
- 顺序写入日志
- 垃圾回收机制
9.2 文件系统一致性
1. fsck检查:
- 超级块校验
- inode完整性检查
- 链接计数验证
2. 日志机制:
- 预写日志(WAL)
- 元数据日志(Journaling)
- 检查点(Checkpoint)
十、设备管理专题
10.1 I/O体系结构
1. 设备分类:
- 块设备(磁盘):固定大小传输
- 字符设备(终端):流式传输
2. 通信方式:
- 端口映射I/O(in/out指令)
- 内存映射I/O(MMIO)
10.2 性能优化技术
1. DMA传输:
- 绕过CPU直接内存访问
- 减少中断开销
2. 磁盘调度:
- SSTF(最短寻道优先)
- 电梯算法(SCAN)
- 预期调度(Anticipatory)